
仿人五指灵巧手
行业类别
-

扫码添加市场经理人
立即咨询
产品详情
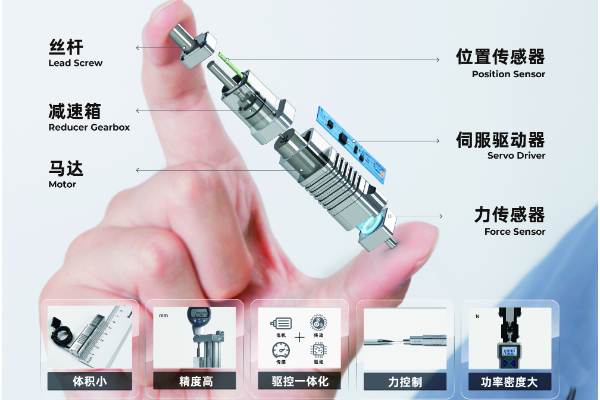
内部集成了6个力控微型伺服电缸,单手具有6个自由度和12个运动关节,外形美观且高度仿真,结合力位混合控制算法,具有亚毫米级定位精度和数千克的负载能力,可以模拟人手实现精准的抓取操作。是国内首款商业化五指灵巧手,突破多项技术瓶颈,使产品成本大幅降低。
公司简介
北京因时机器人科技有限公司
北京因时机器人科技有限公司创立于2016年,是一家专注于微型精密运动部件研发制造和伺服控制技术突破创新的高新技术企业。典型产品包括微型直线伺服驱动器和机器人末端执行器,在微小型、高精度和力控技术等方面具有独特优势。因时机器人将持续深耕微型伺服运动控制领域,力求研制出更微小更精密的运动控制零部件,为机器人行业、生产制造业及生物医疗(医美)器械行业提供更多产品和更专业的服务。

深圳国际工业制造技术及设备展览会
2025年3月26日-3月29日 周三至周六 9:00-17:00
地址: 广东省深圳市宝安区福海街道展城路1号
资讯订阅
Powered By: 江南官方体育APP下载 ©all right reserved. 粤ICP备15003597号



