- 2025
- 2024
- 2023
- 全部
- 中国大陆
- 中国台湾
- 中国香港
- 德国
- 日本
- 美国
- 韩国
- 意大利
- 瑞士
- 瑞典

.png)


医药机器人MC004N
MC004N采用镀铬表面涂层,机器人电缆软管采用内置设计,无真空配管,洁净度可实现ISO等级5(Fed等级100)。 可对应输液包搬运、冻干托盘搬运、浮游菌/沉降菌的取样、容器清洗和故障排除、片剂包衣、崩解片剂处理等情况。可实现在抗癌药、疫苗、放射性药品等隔离器中进行容器搬运、灌装、称重、清洁等,实现无菌/危险区的无人化。

医药机器人MC004V
MC004V采用镀铬表面涂层,机器人电缆软管采用内置设计,无真空配管,洁净度可实现ISO等级5(Fed等级100)。 可对应输液包搬运、冻干托盘搬运、浮游菌/沉降菌的取样、容器清洗和故障排除、片剂包衣、崩解片剂处理等情况。可实现在抗癌药、疫苗、放射性药品等隔离器中进行容器搬运、灌装、称重、清洁等,实现无菌/危险区的无人化。

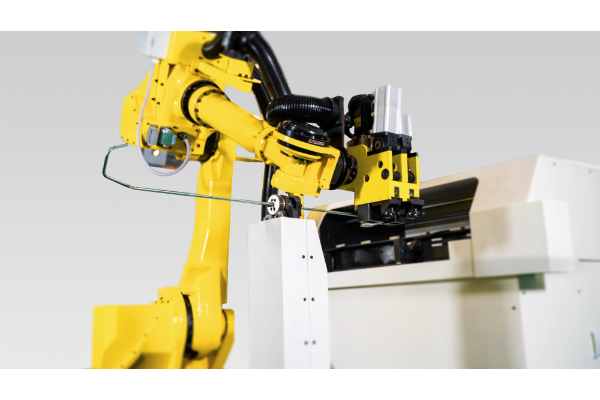
盐水袋分拣单元
该展示单元解决了医药行业内因设备场地的布局限制以及产线老旧的情况下,生产工艺无法接续的问题,其中最关键的是透明液体的3D视觉识别+2D视觉识别以及机器人同步抓取的技术。 该单元使用3台机器人的情况下,占地面积仅12.5㎡,还可以用于食品以及快递物流行业中的分拣应用,同时还可以通过3D视觉+AGV的配合,提高生产自动化水平和生产效率。

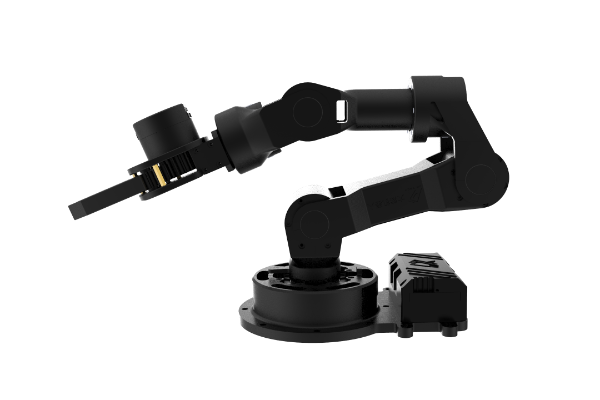
机械臂ECO62
ECO62型机械臂外形小巧,负载大,兼具优异的工业性能,满足在狭小空间的与人协 作、快速作业需求;轻量圆滑外观带来本质安全;动作柔顺带来交互安全;支持工业、医疗、商服、教育等行业场景应用及定制化。

具身双臂升降平台
用户可以基于平台开发无线遥操作、双臂操作的数据采集和模型训练,并进行各类场景的巡检和操作任务的自主规划与执行,应用领域广泛,涵盖工业、商业、家庭和科研等场景。

AI理疗机器人
睿尔曼AI理疗机器人,遵循中医基础理论,将中医治疗理念融入到设计中,通过集成AI识别、机械学习、视觉定位、运动控制、力感知等前沿技术,实现了传统中医经血手法治疗与AI结合的“手、眼、脑”一体化。 A理疗机器人通过强大AI能力,能够快速精准的识别人体的经络穴位;通过机械臂的柔性化控制和多种按摩头,模拟专业医师的手法和技巧,实现按摩动作更加自然和精准,通过强大的中控系统和友好的UI交互界面,快速生成个性化治疗项目,可以帮助用户舒筋通络、改善血液循环、促进自愈、激发潜能,系统性的改善人体健康问题。

.png)




智能一体化关节
DrEmpower 智能一体化关节作为机器人智能驱动器,不仅满足运动学控制的各项需求,同时也可满足动力学控制实践,包括谐波减速器系列(HSA)、行星减速器系列(PDA)、中空系列(HCA)。其运动智能特点,包括运动控制、参数回读、参数设置和自主决策,使得用其开发的机器人产品更加贴近应用水平。
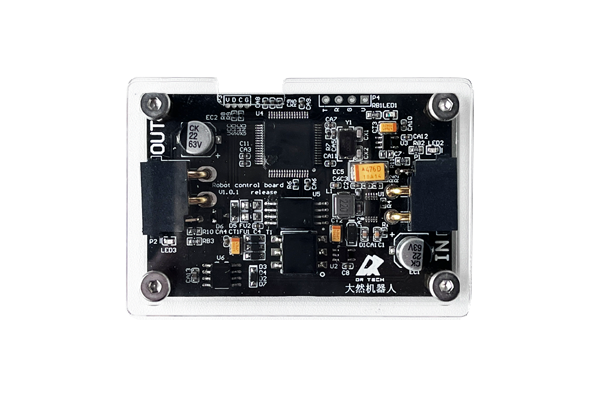
机器人标准模型控制器
机器人标准模型控制器适用于同构型所有尺寸机器人,内置运动控制算法和功能,用户仅需输入机器人各部分尺寸和重量等“易得”参数就能完成机器人建模,调用API接口函数便可进行运动控制和功能开发。
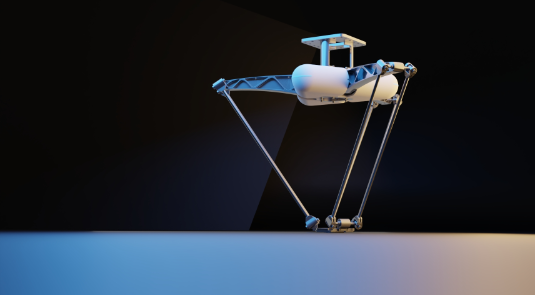
Aloha 机械臂
Aloha 机械臂可用于抓取操作、遥操作、AI大模型研究
深圳国际工业制造技术及设备展览会
2026年3月31日-4月3日 周二至周五 9:00-17:00
地址: 广东省深圳市宝安区福海街道展城路1号
资讯订阅
Powered By: 江南官方体育APP下载 ©all right reserved. 粤ICP备15003597号


